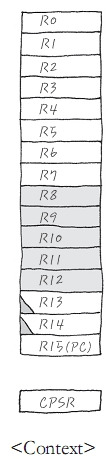
Context : 현재 CPU에 대한 모든 정보( == Register들의 현재 값들) 현재 System이 동작하는데 필요한 모든 정보를 담고 있음. R0~R12 : CPU의 연습장. R13 : Stack Pointer, 현재 CPU가 사용하고 있는 Stack의 주소 중,, 마지막 Push한 Data가 있는 곳의 주소. R14 : Linked Register ::어디서 왔는지, 어디로 돌아가야 하는지에 대한것, R15 : (PC) : 현재 실행 주소 정보 CPSR : 현재 CPU의 상태에 대한 주소. Register 값들만 잘 보존하면 pc를 왔다갔다 가능 > Function Callvoid ContextDaughter();void ContextMother (void){ 나불나불나불~ ..